


The CBE series #2 - Online resizing
This article describes in detail how online resizing is done in the Consistent Block Encrypter (CBE). Online resizing enables the user to re-dimension the block pools used in the CBE block device with the device remaining accessible throughout the entire process.
The CBE series
This series of articles describes the features and integration of the Consistent Block Encrypter (CBE) in detail. The CBE is a block-device encryption component with its core logic entirely written in SPARK. It combines multiple techniques to ensure confidentiality, integrity, consistency, and freshness of the block data efficiently. Furthermore, the whole core logic so far passes gnatprove in mode "flow".
In case you are not familiar with the basic structure of the CBE, I'd recommend you this introduction before reading on:
The other articles in this series so far:
The source code on GitHub:
Resizing - The basics
The CBE is currently resizable in two ways. The virtual block device can be extended and the free tree can be extended. As both operations have a lot in common, I'll describe the basic idea first and will go into the pecularities later.
Directly at the CBE interface, an extension operation is communicated like any other operation by submitting a request. The request has either the operation type "Extend Virtual Block Device" or "Extend Free Tree". The request carries one parameter that is the number of physical blocks that shall be added to the CBE. Note that the set of physical blocks that the CBE uses is always given as contiguous range of block addresses that starts with block address 0. The CBE furthermore remembers this range in the superblock. That said, when telling the CBE to extend itself using N additional physical blocks and A is the highest physical block address currently used, the CBE will incorporate the physical block addresses A + 1 to A + N.
As an extension operation might require the CBE to update and write many branches of different trees, the operation can be time intensive depending on the number of added physical blocks. Extension operations are therefore implemented in a way that doesn't block all other operations on the device. The CBE will continue handling "Read", "Write", "Sync", and "Discard Snapshot" requests during the extension process. I will refer to them as concurrent requests. At the other hand, "Create Snapshot", "Extend Free Tree", "Extend Virtual Block Device", and "Rekeying" requests cannot be executed in parallel to an extension operation. I will refer to these as non-concurrent requests.
When submitting an extension request it will be added to the request-scheduling queue of the CBE. The actual execution of the request, however, doesn't start until all non-concurrent requests that arrived at the scheduler before the extension request are done. Vice versa, non-concurrent requests that arrived after the extension request are blocked until the latter is finished.
Concurrent requests, at the other hand, are executed pseudo-parallel to an extension. This means that an extension is not done in one big operation. It is rather split up into many small atomic operations and each time one of these atomic operations is done, the CBE device is left in a state that allows for intermixing concurrent requests before the next extension step starts.
This also has the benefit that there are many consistent intermediate states during an extension that can be secured to the physical block device and the trust anchor. Should the system be turned off during an extension, the progress isn't lost (except the last unfinished step of course) and the extension operation can be continued on next startup. Better said, it has to be continued on next startup, because the virtual block device would otherwise remain in a state that limits the functionality of the CBE.
That said, the CBE has to remember inside the superblock that an extension operation is pending and in which state it is. And it will automatically continue a pending extension operation on startup as the first request in the scheduling queue. Note that this is only the case for a running extension operation. An extension requests somewhere in the scheduling queue that is not yet started will be - like any other scheduled request - forgotten on system shutdown.
There are two types of atomic extension operations: The initialization of the extension process and the extension of the targeted tree by a small number of leaf nodes using the contingent of new physical blocks. The extension of a tree can be implemented simply as a series of tree walks as we will see later. In the CBE an extension step is limited to the outcome of one tree walk. As a result of that, the number of leaves added during an extension step is at least one and no more than the trees degree (number of edges per inner node).
|
|
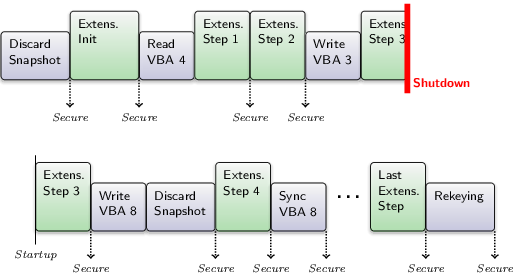
Exemplary schedule during an extension operation
|
After the initialization step, the CBE keeps doing extension steps on the targeted tree until the contingent of new physical blocks is depleted. At the end of each of these atomic extension operations, the CBE updates the superblock, secures the device state, and tries to prepone up to 8 concurrent requests before starting the next extension step.
Initializing the extension process
In order to initiale the extension process, the CBE first sets the superblock to state "Extending Virtual Block Device" or "Extending Free Tree" depending on the targeted tree. Furthermore, it remembers in the superblock the contingent of new physical superblocks that is left for the extension operation. Initially, this is the number of physical blocks given in the extension request of the user but throughout the extension process it will be decreased more and more.
Once updating the superblock is done, the superblock and the corresponding state can be written out to the physical block device and secured at the trust anchor. This procedure looks as follows: First, the CBE issues a request at the trust anchor to encrypt the symmetric key using the private key of the user. Note that the private key of the user is known only to the trust anchor.
Then, the superblock is written out to a new superblock slot on the physical block device which is then synchronized together with the CBE block caches. Finally, the trust anchor is requested to store the hash of the superblock, i.e., the superblock is secured. In case of a system shutdown, this will allow the CBE to find and verify the new superblock slot on next startup. When the superblock was secured successfully, the last secured generation is set to the current generation and the current generation is incremented by one.
A tree extension step
For doing an extension step at the targeted tree, the CBE first determines the identifier of the right-most complete branch in the tree. For the virtual block device, this is the highest virtual block address covered. For the free tree this is technically the same, the combination of edge indices along the way of the branch. But as the branches in the free tree are not related to block addresses, we call it branch identifier instead. The left-most branch always has the identifier 0, the second left-most the identifier 1, and so on.
So, the identifier of the right-most branch in the tree is known. The CBE now wants to add a new branch to the right of the right-most branch. Consequently, this new branch would have the identifier X + 1, where X is the identifier of the right-most branch. With this identifier known, two situations must be distinguished. The current tree geometry - the number of tree levels and the number of edges per inner node - defines a maximum for the number of branches that the tree can contain.
If the identifier of the new branch is greater or equal to this maximum, the current tree geometry doesn't suffice for adding another branch. In this case, a new root level is added atop the current root level of the tree before the new branch can be added. Thereby, the first edge of the new root references the old root while all other edges of the new root are now available for extending the tree. The physical block for the new root is taken from the contingent of the extension operation.
If the identifier of the new branch, however, is less than the maximum number of branches that the tree can contain, the current tree geometry is sufficient and can therefore remain unmodified. Note that in this case, the nodes for the new branch already exist down to a certain tree level. We don't know down to which level but at least the leaf node is definitely missing.
Now that we have the tree geometry right, adding the new branch is performed by doing a tree walk for the identifier of the branch. Whenever we find a yet unset edge during this tree walk, a new physical block is taken from the contingent to form the missing node and let the edge reference it. This also applies for the missing leaf node at the end of the tree walk. In the virtual block device, the new leaf node is marked with generation 0 to indicate that its data is yet uninitialized. In the free tree, the new leaf node is marked as not reserved with the current generation as free generation. I.e., the new leaf node can be allocated as soon as the next superblock securing is through.
But wait. Once we are down here, we can utilize the situation better. If the lowest inner node of the tree walk has more unset edges, they can be used to add further branches with almost no effort as each of them merely misses the leaf. So, to say it more generally, at the end of the tree walk, we will simply fill up all unused edges of the lowest inner node with new leaf blocks from the extension contingent.
At this point, all inner nodes of the tree walk are in memory. Their hashes need to be updated and then they can be written back to the physical block device. Just as after a normal write request. Of course, for those nodes of the tree walk that already existed and that are not yet volatile (not of the current generation) a copy-on-write must be done in order to update them. The nodes that were just added need no copy-on-write. That said, the CBE allocates the CoW blocks at the free tree, if it's an "Extend Virtual Block Device" request, or at the meta tree, if it's an "Extend Free Tree" request. Then the CBE walks up again through the loaded nodes, updates the hashes of the edges, and does the write back.
|
|
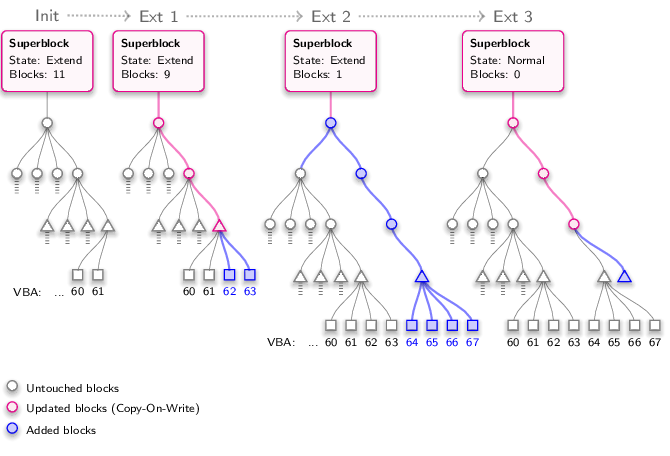
The steps of an extension operation illustrated
|
If the targeted tree is the virtual block device and the most recent device state (the one on which we did the tree walk) was a read-only snapshot (i.e. no modifications were made at the CBE since the last securing), a new, volatile device state must be created in order to reference the updated tree in the superblock.
Finally, the number of remaining physical blocks for the extension operation is updated in the superblock. If the number reaches 0, the CBE returns to the state "Normal" and the extension request is returned as successful. If there are still physical blocks left for the extension the superblock remains in the "Extend Virtual Block Device" respectively "Extend Free Tree" state. To complete the extension step, the updated CBE state is synchronized and secured as described in the previous section.
Free tree extensions and the meta tree
When extending the free tree there is one thing that is missing in the above description of the algorithm. The meta tree, that manages the sparse blocks for the CoW in the free tree, must always be dimensioned according to the size of the free tree. It is assumed that an allocation at the meta tree for CoW in the free tree never fails. Adding the fact that there are never more than two versions of the free tree meta data, this means that the meta tree must have at least as many leaves as there are inner nodes in the free tree. The same as for the free tree meta data also applies for the meta data of the meta tree itself. So, to sum it up, the number of leaves in the meta tree must be at least the number of inner nodes in the free tree plus the number of inner nodes in the meta tree.
That said, whenever the CBE is at the point of adding the first new inner node during a free tree extension step, the meta tree is extended as a prerequisite. This is done the following way. First, we have to know how many leaves the meta tree must have so that we can finish the extension step. For this, we have to know the total number N1 of inner nodes that the free tree will have with the new branch. This number can be calculated because, at this point, we already know how many leaves the free tree will have after the extension step. Then, we can determine the number N2 of inner nodes that the meta tree would have with N1 leaves. After that, we calculate the number N3 of inner nodes that the meta tree would have with N1 + N2 leaves. And so on and so on, until we reach the point where the assumed number of leaves in the meta tree doesn't change anymore. This final number of leaves is then set as goal for the meta-tree extension.
The CBE will now check whether the meta tree already fulfills this goal or not. If not, it will issue one meta tree extension step, and afterwards check again. If the goal is still not reached, the CBE continues issuing meta tree extension steps until there are enough leaves. Note that all this is done as part of the atomic free tree extension step and no other request can be scheduled in between. After that, the CBE can continue with adding the new inner nodes to the free tree.
An extension step at the meta tree is done using the same algorithm as for the free tree and the virtual block device. The only difference is that, for doing the CoW, we allocate blocks directly from the lowest inner node of the new meta-tree branch. This is always possible because the degree of the meta tree is always greater than its number of levels. Either the lowest inner node is a new node, then we can add new leaves as required. Or, the lowest inner node already existed, which leaves us with two further situations. If one of the leaves of the lowest inner node is already allocated, the branch needs no CoW anymore. Otherwise we have enough leaves to do the CoW.
Depletion of the contingent of new physical blocks
A remaining topic is how the depletion of the contingent of new physical blocks is handled. The extension algorithm assumes that the contingent of new physical blocks can be of any size and that it will always be incorporated completely by the CBE. So, the possibility of having no blocks left must be considered at any point in the algorithm were a block shall be taken from the contingent.
Obviously, the easiest situation is that the continguent is consumed exactly when having filled up all edges of the lowest inner node of the extension tree walk in the targeted tree. Then, the extension step can be finished as described. The same goes for the case that we filled up some but not all of the edges of the lowest inner node. A future extension request will deal just fine with the remaining edges.
More interesting is the situation that the contingent becomes empty when we want to add an inner node to the targeted tree. But fortunately our algorithm is well prepared for that. If the parent node of the missing inner node is not a new node, this means that the extension step has done nothing to the targeted tree so far. We can simply jump to the superblock handling without updating the targeted tree (the meta tree, however, might have changed nonetheless). If the parent node of the missing inner node is a new node, we have to stop and walk up again updating the hashes and doing the write back. The unfinished new branch remains in the targeted tree with its lowest inner node having all edges unset (if it is not a new root node). The CBE has no problem with this as it only translates VBAs that ar in its range. It will simply never do a tree walk that leads into these new inner nodes. A future extension request on this tree, however, expects finding a missing edge during its tree walk for the lowest invalid VBA. The position of this edge is not relevant.
If the contingent becomes depleted during the extension of the meta tree, all this applies as well. The corresponding extension step at the free tree has done nothing to the free tree so far.